



د درې محور افقي ګرځېدو موقعیت ورکوونکی / د ویلډینګ روبوټ موقعیت ورکوونکی
تخنیکي پیرامیټرې
| عمودی ټرن اوور درې محوري سروو پوزیشنر | افقي روټري درې محوري سروو پوزیشنر | ||||||
| د لړۍ شمېره | پروژې | پیرامیټر | پیرامیټر | یادونې | پیرامیټر | پیرامیټر | یادونې |
| 1 | درجه بندي شوی بار | ۵۰۰ کیلوګرامه | ۱۰۰۰ کیلوګرامه | د دوهم محور د R400mm شعاع دننه | ۵۰۰ کیلوګرامه | ۱۰۰۰ کیلوګرامه | د دوهم محور د R400mm/R500mm شعاع دننه |
| 2 | د سپینډل معیاري ګیریشن شعاع | R۱۲۰۰ ملي متره | R۱۵۰۰ ملي متره | R۱۲۰۰ ملي متره | R1800 ملي متره | ||
| 3 | د کاونټرشافټ معیاري ګیریشن شعاع | R400 ملي متره | R500 ملي میتر | R400 ملي متره | R500 ملي میتر | ||
| 4 | د لومړي محور د څرخېدو زاویه | ±۱۸۰ درجې | ±۱۸۰ درجې | ±۱۸۰ درجې | ±۱۸۰ درجې | ||
| 5 | د دوهم محور د گردش زاویه | ±۳۶۰ درجې | ±۳۶۰ درجې | ±۳۶۰ درجې | ±۳۶۰ درجې | ||
| 6 | د لومړي محور د پورته کېدو سرعت ټاکل شوی | ۵۰ درجې/ثانیه | ۲۴ درجې/ثانيه | ۵۰ درجې/ثانیه | ۲۴ درجې/ثانيه | ||
| 7 | د دوهم محور د څرخېدو سرعت درجه بندي شوی | ۷۰ درجې/ثانیه | ۷۰ درجې/ثانیه | ۷۰ درجې/ثانیه | ۷۰ درجې/ثانیه | ||
| 8 | د موقعیت دقت تکرار کړئ | ±0.10 ملي متره | ±0.20 ملي میتر | ±0.10 ملي متره | ±0.20 ملي میتر | ||
| 9 | د بې ځایه کیدنې چوکاټ د سرحد ابعاد (اوږدوالی × پلنوالی × لوړوالی) | ۲۲۰۰ ملي متره × ۸۰۰ ملي متره × ۹۰ ملي متره | ۳۲۰۰ ملي متره × ۱۰۰۰ ملي متره × ۱۱۰ ملي متره | ۲۲۰۰ ملي متره × ۸۰۰ ملي متره × ۹۰ ملي متره | ۳۲۰۰ ملي متره × ۱۰۰۰ ملي متره × ۱۱۰ ملي متره | ||
| 10 | د موقعیت بدلونکي ټولیز ابعاد (اوږدوالی × پلنوالی × لوړوالی) | ۴۰۰۰ ملي متره × ۷۰۰ ملي متره × ۱۶۵۰ ملي متره | ۵۲۰۰ ملي متره × ۱۰۰۰ ملي متره × ۱۸۵۰ ملي متره | ۴۰۰۰ ملي متره × ۷۰۰ ملي متره × ۱۶۵۰ ملي متره | ۴۵۰۰ ملي متره × ۳۶۰۰ ملي متره × ۱۷۵۰ ملي متره | ||
| 11 | د لومړي محور د گردش د مرکز لوړوالی | ۱۳۵۰ ملي متره | ۱۵۰۰ ملي متره | ۸۰۰ ملي متره | ۱۰۰۰ ملي متره | ||
| 12 | د بریښنا رسولو شرایط | درې پړاوه 200V±10%50HZ | درې پړاوه 200V±10%50HZ | درې پړاوه 200V±10%50HZ | درې پړاوه 200V±10%50HZ | د جلا کولو ټرانسفارمر سره | |
| 13 | د عایق ټولګي | H | H | H | H | ||
| 14 | د تجهیزاتو خالص وزن | شاوخوا ۱۸۰۰ کیلوګرامه | شاوخوا ۳۰۰۰ کیلوګرامه | شاوخوا ۲۰۰۰ کیلوګرامه | شاوخوا ۲۰۰۰ کیلوګرامه | ||
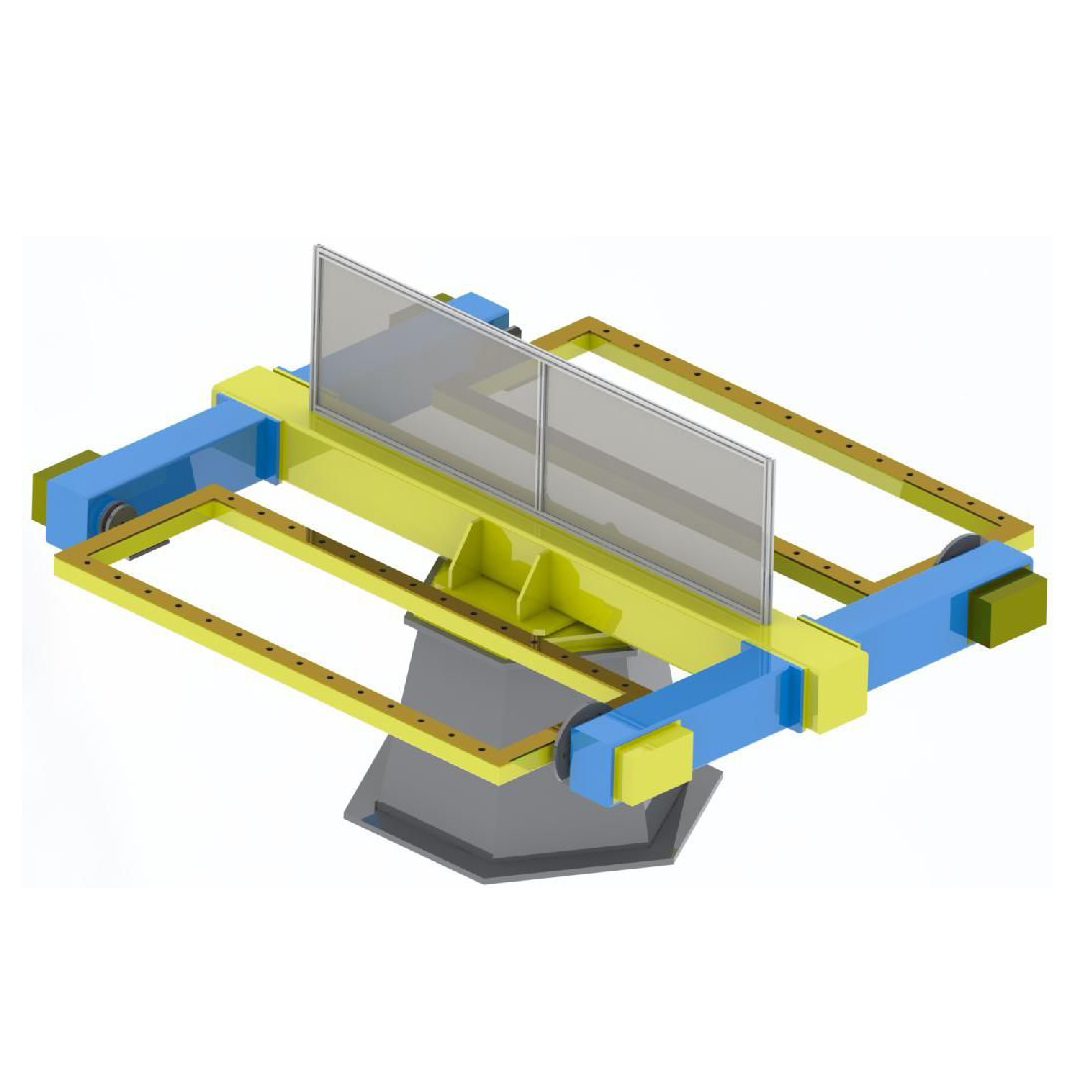
افقي روټري درې محوري سروو پوزیشنر

عمودی ټرن اوور درې محوري سروو پوزیشنر
د جوړښت پیژندنه
د درې محوري عمودي بدلون سروو موقعیت ورکوونکی په عمده توګه د ویلډ شوي انټیګرل چوکاټ، بدلون بې ځایه کولو چوکاټ، AC سروو موټرو او RV دقیق کمولوونکي، روټري ملاتړ، کنډکټیو میکانیزم، محافظتي ډال او بریښنایی کنټرول سیسټم څخه جوړ شوی دی.
د ویلډ شوي انټیګرل چوکاټ د لوړ کیفیت پروفایلونو سره ویلډ شوی دی. د انیل کولو او فشار کمولو وروسته، دا باید د مسلکي ماشین کولو لخوا پروسس شي ترڅو د کلیدي پوستونو لوړ ماشین کولو دقت او دقت ډاډمن شي. سطح د زنګ ضد ظاهري رنګ سره سپری شوی، کوم چې ښکلی او سخاوتمند دی، او رنګ یې د پیرودونکو اړتیاو سره سم تنظیم کیدی شي.
د بدلون بې ځایه کولو چوکاټ باید د لوړ کیفیت پروفایل فولادو سره ویلډ شي او د مسلکي ماشین کولو لخوا پروسس شي. سطحه باید د نصب کولو موقعیت وسیلې لپاره د معیاري تار شوي سوري سره ماشین شي، او رنګ کول، تور کول او د زنګ مخنیوي درملنه به ترسره شي.
د RV ریډیوسر سره د AC سرو موټور د بریښنا میکانیزم په توګه غوره شوی، کوم چې کولی شي د گردش ثبات، د موقعیت دقت او ډاډ ترلاسه کړي.
اوږد دوام او د ناکامۍ ټیټه کچه. د چلولو میکانیزم د پیتل څخه جوړ شوی، کوم چې ښه چلولو اغیزه لري. چلولو اساس بشپړ موصلیت غوره کوي، کوم چې کولی شي په مؤثره توګه د سرو موټرو، روبوټ او ویلډینګ بریښنا سرچینې ساتنه وکړي.
د بریښنایی کنټرول سیسټم د جاپاني اومرون PLC غوره کوي ترڅو د موقعیت کنټرول وکړي، د مستحکم فعالیت او ټیټ ناکامۍ کچه سره. بریښنایی اجزا د کور دننه او بهر د مشهورو برانڈونو څخه غوره شوي ترڅو د کارونې کیفیت او ثبات ډاډمن کړي.
د رڼا د مخنیوي پوښ د المونیم پروفایل او المونیم پلاستيکي پلیټ سره راټول شوی ترڅو د ویلډینګ او پرې کولو پرمهال د رامینځته شوي آرک رڼا څخه ساتنه وکړي.








